Поделка робот своими руками: 100 фото
Я разрабатываю роботов и меня часто спрашивают — «как сделать робота», «где ты находишь информацию, какие ресурсы используешь»? Если вы не знаете с чего начать и хотите сделать собственного робота — эта статья для вас — в ней я постараюсь объяснить процесс, а также расскажу какие должны быть первые шаги. Долгое время я работал на различных предприятиях инженером-конструктором, занимался проектированием механической части устройств.











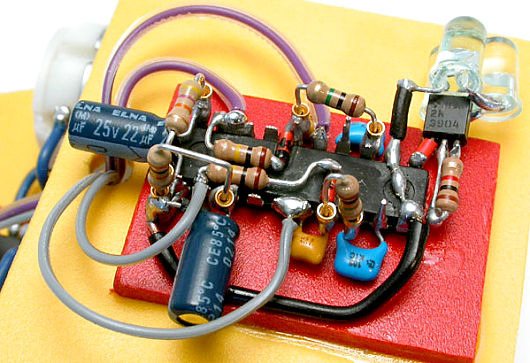
Статья "Трюки с драйвером двигателей LD, или Как сделать простейшего робота с поисковым поведением" является продолжением статьи "Как сделать простейшего робота". В этой статье мы рассмотрим, как подключить двигатели к микросхеме LD таким образом, чтобы реализовать простейшее поисковое поведение. Наш робот на одной микросхеме будет не просто следовать на свет, а при отсутствии света замирать до тех пор, пока на него снова не упадет свет, но будет пытаться искать источник света, поворачиваясь в его поиске, или следовать по границе освещенного пространства.




If you have an account, sign in now to post with your account. Note: Your post will require moderator approval before it will be visible. Restore formatting. Only 75 emoji are allowed. Display as a link instead.